
當前位置: CompoTech China > 關鍵技術和應用 >
制造業和服務行業對更高自動化水平的需求不斷增長,推動了人形機器人的開發。人形機器人變得更加復雜和精確,自由度 (DOF) 變得更高,并且對周圍環境的響應時間(按毫秒計)縮短,從而能更好地模人形類的動作。圖 1 展示了人形機器人的典型電機和運動功能。
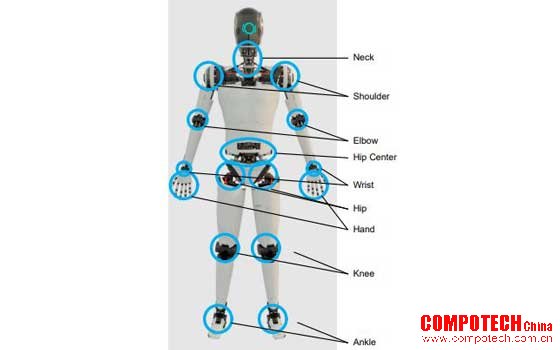
圖 1. 顯示人形機器人 DOF 變得更高的位置
具有更高的 DOF 意味著人形機器人需要更多的電機驅動器。機器人設計中的驅動器位置決定了不同的驅動器要求。部分關鍵規格是:
? 通信接口架構
? 位置感測
? 電機類型
? 電機控制算法
? 功率級要求
? 電子電路尺寸
? 功能安全注意事項
目前,雖然針對協作機器人和工業機器人制定了相關標準,但沒有規定人形機器人功能安全要求的標準。隨著需求的持續增長,預計標準機構將來會為人形機器人規定安全要求。在規定安全要求之前,人形機器人設計人員必須對當前系統設計進行相應調查,從而在將來盡可能減少因重新設計所帶來的工作。ISO13482、ISO10218 和 ISO 3691-4 可以闡明未來的預期。
通信接口架構
鑒于驅動器在機器人中的位置,因此優化與所有驅動器的通信,同時最大限度地減少布線數量非常重要。實現優化的備選方法有很多;最常用的方法是菊花鏈通信和線性總線拓撲,如圖 2 和圖 3 所示。
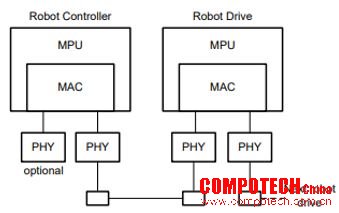
圖 2. 菊花鏈通信
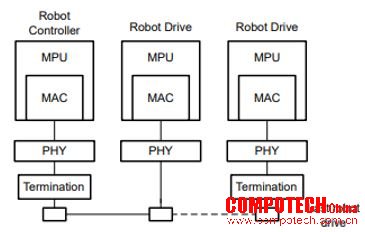
圖 3. 線性總線拓
選擇拓撲后,為了實現足夠的驅動器響應時間,需要考慮帶寬、時序和延遲要求。響應時間可以根據規定的數據幀大小確定需要哪種支持實時通信的通信協議。通信接口的帶寬要求也會受到以下方面決定的影響:如何在分散式電機驅動器、集中式和外部機器人運動控制器之間拆分電機控制算法,從而最大限度地減小節點之間所需的通信幀大小。
通常,通信系統的最低帶寬要求約為 8Mbit。但是,隨著設計趨勢的發展變化,這些趨勢表明對系統診斷和安全功能的要求在不斷提高。
根據系統要求,人形機器人系統中通常使用的通信接口基于 CAN-FD 或以太網(包括 EtherCAT)。TI 提供物理層 (PHY) 收發器和嵌入式處理器,旨在支持這些通信協議。
CAN 收發器和以太網 IC 是人形機器人系統開發中使用的器件。
位置檢測
人形機器人在運動時,必須接收電機位置數據以定義路徑規劃。位置數據可實現人形機器人受控的移動。為了以高精度實現受控移動,機器人必須配備轉子位置傳感器以在電機上捕獲信息,并能夠通過電機驅動器高效地將信息傳遞到中央處理計算機。根據所需的電機精度,使用多種轉子位置傳感器。下面是一些最常用的編碼器:
? 光學編碼器
? 磁性編碼器
? 增量編碼器
? SIN/COS 旋轉變壓器
這些編碼器具有不同的接口來連接至驅動器并提供轉子角度數據,在進行位置控制時需要使用這些數據。這些接口需要特定的硬件,因此電機控制處理器至少需要支持以下編碼器配置之一:
? 專用串行接口,如 BiSS、Endat、Hiperface 或其他數字絕對編碼器
? 具有采樣保持功能且適用于旋轉變壓器接口的 ADC 轉換器
? 增量編碼器的正交編碼器脈沖
? 用于接合磁性編碼器的串行接口
一個電機可能需要多個編碼器,具體取決于電機和電機傳動裝置的實現方式。TI 提供模擬和處理器 IC 來實現編碼器接口系統。在位置感測方法中使用了 RS-485 和 RS-422 收發器以及多軸線性和角度位置傳感器。
電機類型
由于人形機器人用電池供電,因此電機驅動器旨在更大限度地提高效率,從而延長機器人的工作時間范圍。
當使用高功率級別時,人形機器人可以集成 PMSM 之類的電機。有刷直流電機可用于一些低功耗情況,例如手部控制和手指控制。但是,當前的設計趨勢表明,所有電機未來都將是無刷式電機。
PMSM 電機有兩種繞組選擇:梯形繞組或正弦繞組。對繞組和控制算法的選擇會影響電機控制的精確度。
電機設計的另一個關鍵要素是更快地切換 FET,這樣就可以使用能提高電機單位重量扭矩的新設計選項。
電機控制算法
選擇電機類型后,用戶可以確定控制電機的方法。實現控制回路有多種備選方法,但電機控制通常與圖 4 中所示類似,其中顯示了所需的模擬子系統和處理器外設。
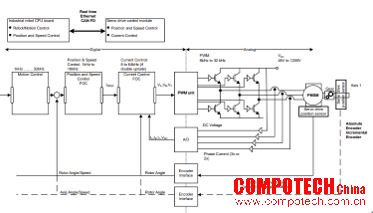
圖 4. 機器人控制的實時通信時序需求
使用圖 4 作為通用模板,表 1 列出了在選擇算法 FOC 或阻塞換向時所需的外設和性能。

表 1. 電機控制類型的外設和電路需求
TI 具有許多不同的 MCU,可滿足算法和角度傳感器的要求。重要的因素包括 IC 的大小和實現高性能驅動系統的實時能力。在電機控制算法中使用了 C2000 實時微控制器和基于 Arm 的微控制器。
功率級要求
根據機器人的驅動器位置,功率級別在 10W 至 4kW 之間變化,大多數驅動器在 10W 至 1.5kW 之間。
驅動器通常在低于 60V 的 SELV 電壓范圍內工作。因此,組件必須在最高達 60V 的電壓下工作。對于放大器、FET 和柵極驅動器,為了減輕系統中潛在噪聲的影響,最好使用最高可在 100V 電壓下運行的元件。在定義驅動器的電氣規格后,還有其他設計注意事項。
可用于實現印刷電路板 (PCB) 的物理尺寸是另一個設計注意事項。小尺寸 IC 和高度優化的功率密度設計對于實現小空間設計目標至關重要。高功率密度會導致機器人的潛在溫度限制,在該限制下機器人的外部不得高于 55°C。在 55°C 時,在 30 秒內會發生全厚度皮膚灼傷。溫度管理方法不得包括風扇或液體等額外冷卻方式。
溫度管理和空間的平衡促成功率級相對于單位尺寸瓦特數的平衡,這會影響功率級架構??赡苄枰鉀Q的一個問題是,確定功率級是否需要在更高的頻率下工作。這一問題通常出現在 MOSFET 中,但與基于 MOSFET 的系統相比,GaN FET 等新技術也可提高開關性能。對于溫度敏感型系統,與 MOSFET 技術相比,GaN FET 具有更高的理論效率,因為其開關損耗非常低。頻率的增加會導致 MCU 需要額外的功能,這樣才能支持以足夠高的分辨率實現更高頻率開關所需的信號發送。
TI MOSFET 柵極驅動器讓客戶能夠以盡可能高的速度開關 MOSFET,而 TI 低壓 GaN FET 讓客戶能夠快速比較和考慮機器人中每個位置的最佳 FET 類型。
需要使用高性能 MOSFET 或 GaN FET 來實現驅動器,從而提高電機效率。精密算法有助于減少電機 FET 的開關需求和損耗。
人形機器人由電池供電,供電電壓通常為 48V,或者在 39V 至 54V 之間,具體取決于電池的電量狀態。使用的電壓取決于所設定的最小電池電量級別。前面提到,驅動器在 39V 時所需的最大功率為 4kW,可以看出,機器人驅動器需要在大約 102Arm 的電流下以最高效率工作來提供所需的功率,但同時考慮到 0A 左右的精確測量,在這里縮短 FET 的死區時間還有利于 0A 左右電流測量的線性,讓測量在低電流下更加精確。
在評估功率級要求和選擇適當的電流檢測器件以實現所需的性能水平時,電流檢測也是一個重要的設計考慮因素。
TI 提供同相電流感測和低側電流感應模擬選項,以及有關如何高效實現系統的設計指南。通常使用同相電流感測,以便始終能夠檢測電流并提高測量的精度。有三種不同的電流測量選項:

表 2. 適用于同相電流測量的典型同相電流感測選項
對于電流感測放大器和 Δ-Σ 調制器,由于組件改進,這些技術所用的電流電平緩慢地移動到 100A 左右。
? 電流傳感放大器
? Δ-Σ 調制器
? 霍爾傳感器
? GaN Fet 功率級
? 柵極驅動器
功能安全
在規劃未來的設計時,選擇能夠簡化功能安全認證的器件非常重要。ISO13482、ISO10218 和 ISO 3691-4 標準闡明了未來對人形機器人的預期。兩種 C 類標準(ISO10218 和 ISO3691-4)都參考了 ISO13849,規定系統必須是 PLd。但是,ISO3691-4 將架構交給實現者來確定,而 ISO10218 則要求 CAT3 架構。考慮到這些標準中的最糟糕情況,至少需要考慮人形機器人的 CAT3 PLD 安全注意事項。實現 CAT3 系統時,必須采用圖 5 所示的安全架構。
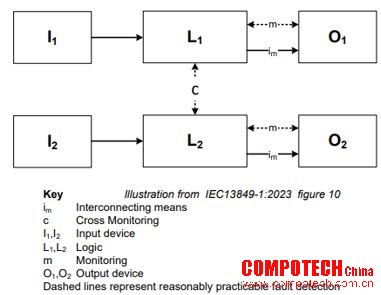
圖 5. IEC13849-1:2015 中的插圖
示例系統
圖 6 中的框圖顯示了建議解決方案,以使用 TI 組件解決 1.5kW 系統設計問題,下面示出了具體可以使用的元件。
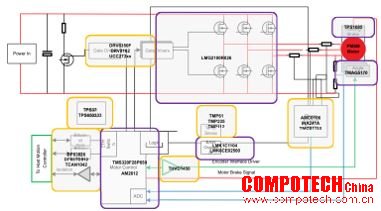
圖 6. 示出實現系統可能所需器件的電機驅動器解決方案
有關更多器件信息,請參考以下 TI 設計和 EVM,以查看系統級性能結果:
? TIDA-010936
? TIDA-010956
? LAUNCHXL-F28P65X
? DP83TC812-IND-SPE-EVM
? TIDA-060040
結語
設計人形機器人驅動器需要精準、靈活和創新。德州儀器 (TI) 提供了全面的集成電路產品系列,讓工程師能夠滿足各種設計規格,從而構建能夠與機器人環境順暢交互的機器人。憑借豐富的評估模塊、參考設計和符合安全標準的器件,TI 簡化了開發流程,有助于縮短上市時間并安心地獲得功能安全認證。與 TI 攜手,打造更智能、更快速、更安全的機器人,讓您的愿景變成現實。
關于德州儀器
德州儀器 (TI)(納斯達克股票代碼:TXN)是一家全球性的半導體公司,從事設計、制造和銷售模擬和嵌入式處理芯片,用于工業、汽車、個人電子產品、企業系統和通信設備等市場。我們致力于通過半導體技術讓電子產品更經濟實用,讓世界更美好。如今,每一代創新都建立在上一代創新的基礎上,使我們的技術變得更可靠、更經濟、更節能,從而實現半導體在電子產品領域的廣泛應用。登陸 TI.com.cn 了解更多詳情。
商標
所有注冊商標和其他商標歸各自所有者所有。
本月熱點 HOME




