
當(dāng)前位置: CompoTech China > 關(guān)鍵技術(shù)和應(yīng)用 >
利用IMU增強(qiáng)機(jī)器人定位:實(shí)現(xiàn)精確導(dǎo)航的基礎(chǔ)技術(shù)
前言:
作者:Sarvesh Pimpalkar,系統(tǒng)應(yīng)用工程師
摘要
本文重點(diǎn)介紹了慣性測(cè)量單元(IMU)傳感器對(duì)于機(jī)器人定位的重要性,并概述了其主要優(yōu)點(diǎn)。IMU可提供關(guān)鍵的運(yùn)動(dòng)數(shù)據(jù),已成為機(jī)器人精確定位的重要組成部分。IMU集成了加速度計(jì)、陀螺儀和磁力計(jì),通過(guò)提供實(shí)時(shí)響應(yīng),使機(jī)器人能夠準(zhǔn)確地確定其方向、位置和運(yùn)動(dòng),從而使機(jī)器人能夠在動(dòng)態(tài)變化的環(huán)境中導(dǎo)航。傳感器融合技術(shù)將IMU數(shù)據(jù)與其他傳感器(例如攝像頭或LIDAR)相結(jié)合,通過(guò)整合多個(gè)數(shù)據(jù)源來(lái)提高定位精度。IMU廣泛應(yīng)用于移動(dòng)機(jī)器人、人形機(jī)器人、無(wú)人機(jī)(UAV)以及虛擬/增強(qiáng)現(xiàn)實(shí)。它們?cè)趯?shí)現(xiàn)精確定位方面發(fā)揮了重要作用,使機(jī)器人能夠自主執(zhí)行復(fù)雜任務(wù)并與周圍環(huán)境有效互動(dòng)。本文探討了在頗具挑戰(zhàn)性的AMR運(yùn)行環(huán)境中,IMU具有哪些應(yīng)用案例,以及IMU在實(shí)現(xiàn)精確定位方面如何發(fā)揮關(guān)鍵作用。
簡(jiǎn)介
自主移動(dòng)機(jī)器人(AMR)對(duì)于未來(lái)的智能工廠和倉(cāng)儲(chǔ)至關(guān)重要,在塑造未來(lái)自動(dòng)化、可持續(xù)和清潔的工廠方面發(fā)揮著關(guān)鍵作用。AMR可提高效率、減少浪費(fèi)并優(yōu)化工業(yè)環(huán)境中的利用率。雖然未來(lái)可能會(huì)專門為AMR建造和優(yōu)化工廠,但讓這些機(jī)器人適應(yīng)現(xiàn)有的倉(cāng)庫(kù)和工廠仍面臨諸多挑戰(zhàn)。AMR面臨的主要障礙涉及兩個(gè)關(guān)鍵部分:高效路徑規(guī)劃(確定最佳路徑)和精確定位(不斷更新其在環(huán)境中的位置)。1
本文主要討論GPS無(wú)法覆蓋的封閉環(huán)境下的室內(nèi)導(dǎo)航。AMR利用一系列傳感器和算法進(jìn)行定位和導(dǎo)航。其中包括攝像頭、LIDAR和雷達(dá)等視覺(jué)傳感器,以及車輪編碼器和IMU等測(cè)程傳感器。每種傳感器模式在范圍、準(zhǔn)確性和傳感信息方面都各有優(yōu)勢(shì)。這些傳感器的組合可確保提供全面的數(shù)據(jù),從而在動(dòng)態(tài)環(huán)境中有效定位機(jī)器人。雖然全面自主性必須要依靠一系列傳感器,但本文重點(diǎn)介紹IMU在具有挑戰(zhàn)性的AMR運(yùn)行環(huán)境中的應(yīng)用案例,以及IMU如何幫助實(shí)現(xiàn)精確定位,這對(duì)于導(dǎo)航和自主性至關(guān)重要。
什么是IMU?
IMU是由微機(jī)電系統(tǒng)(MEMS)器件構(gòu)成的微型器件。其中通常包括:
? 三軸加速度計(jì):加速度計(jì)用于測(cè)量相對(duì)于地球重力場(chǎng)的加速度。在IMU中,三軸加速度計(jì)用于測(cè)量x、y和z軸(見(jiàn)圖1)。
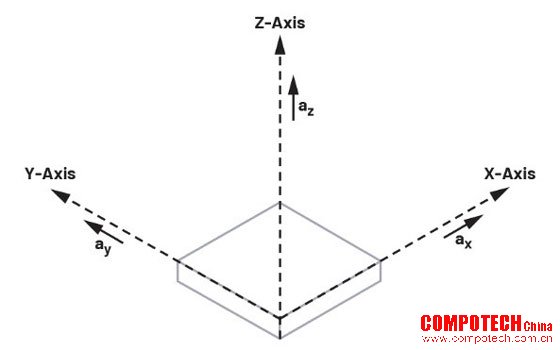
圖1.x、y和z軸上的加速度測(cè)量。
? 三軸陀螺儀:陀螺儀用于測(cè)量旋轉(zhuǎn)速率,提供三個(gè)軸上每個(gè)軸的角速度。三軸陀螺儀可以測(cè)量機(jī)器人在x、y和z軸上的角速度(ωx、ωy、ωz)(見(jiàn)圖2)。
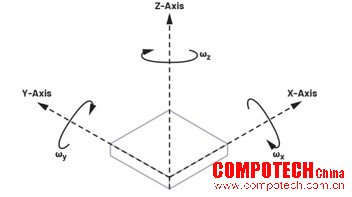
圖2.x、y和z軸上的陀螺儀測(cè)量。
? 高性能磁力計(jì):提供磁場(chǎng)測(cè)量,對(duì)于在具有挑戰(zhàn)性的環(huán)境中準(zhǔn)確估計(jì)方向至關(guān)重要。盡管并不流行,但一些傳統(tǒng)的IMU中配備了磁力計(jì)。
? 其它:溫度傳感器用于補(bǔ)償溫度變化,氣壓計(jì)用于測(cè)量壓力。
IMU功能框圖
? 典型的IMU不僅包括陀螺儀、加速度計(jì)和溫度傳感器,還包括模數(shù)轉(zhuǎn)換以提取測(cè)量值和溫度補(bǔ)償(見(jiàn)圖3)。
? IMU采用板載初步濾波算法,例如板載FIR(有限脈沖響應(yīng))。
? 校準(zhǔn)和補(bǔ)償可糾正任何錯(cuò)位或傳感器偏置。
? 用戶可以選擇在傳輸最終數(shù)據(jù)之前從IMU模塊內(nèi)部軸旋轉(zhuǎn)(d?)以匹配機(jī)器人的參考框架。
為何IMU對(duì)AMR有益?
? 高刷新速率的實(shí)時(shí)定位:自主性和實(shí)時(shí)導(dǎo)航是機(jī)器人操作環(huán)境中的關(guān)鍵要素。然而,感知傳感器的刷新速率通常受到限制,大概在10 Hz到30 Hz的范圍內(nèi)。相比之下,IMU擁有提供高保真位置輸出的能力,最高可達(dá)200 Hz。更高的刷新速率顯著提高了系統(tǒng)在動(dòng)態(tài)環(huán)境中快速適應(yīng)方向快速變化時(shí)的可靠性,從而有助于快速響應(yīng)。憑借加速的刷新速率,AMR還能夠在其他測(cè)量之間的短暫間隔內(nèi)提供估計(jì)姿態(tài)。因此,IMU在實(shí)現(xiàn)實(shí)時(shí)定位方面發(fā)揮著關(guān)鍵作用,其刷新速率比感知傳感器快10倍。
? 航位推算:IMU是航位推算的支柱,航位推算是一種根據(jù)先前已知的位置估計(jì)當(dāng)前位置的導(dǎo)航技術(shù)。IMU可隨著時(shí)間推移不斷提供位置、方向和速度數(shù)據(jù),從而實(shí)現(xiàn)精確估計(jì),有助于AMR實(shí)現(xiàn)可靠導(dǎo)航。
? 緊湊的尺寸和重量:IMU具有緊湊的尺寸和輕便的設(shè)計(jì),非常適合集成到各種移動(dòng)機(jī)器人配置中。例如,ADI公司的ADIS16500的尺寸只有33.25 mm × 30.75 mm,既可確保高效放置,又不會(huì)影響機(jī)器人的機(jī)動(dòng)性。
? 在不同環(huán)境中的可靠性:IMU具有一定的抗電磁干擾能力,可以在多種環(huán)境中運(yùn)行,包括室外和室內(nèi)環(huán)境。因此,它們適合廣泛的應(yīng)用。
? 通過(guò)加快刷新速率提高可靠性:感知傳感器的刷新速率通常限制在約10 Hz至30 Hz之間,而IMU可提供高達(dá)4 kHz原始數(shù)據(jù)的高保真位置輸出,具有顯著的優(yōu)勢(shì)。更高的刷新速率增強(qiáng)了可靠性,特別是在動(dòng)態(tài)環(huán)境中,使AMR能夠快速響應(yīng)并有助于在其他測(cè)量之間的短期間隔內(nèi)估計(jì)姿態(tài)。

圖3.IMU的典型功能框圖。
已經(jīng)有視覺(jué)傳感器的情況下,為什么IMU對(duì)AMR來(lái)說(shuō)仍然必不可少
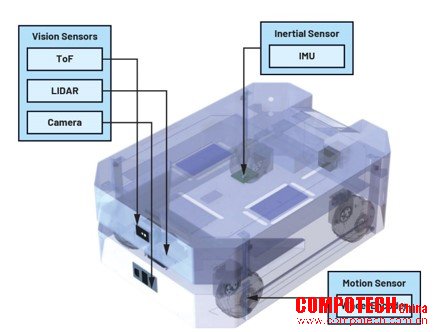
圖4.AMR的傳感器堆棧。
如圖4所示,AMR通常具有多種視覺(jué)傳感器,例如飛行時(shí)間(ToF)、攝像頭、LIDAR等。盡管視覺(jué)測(cè)程提供了豐富的數(shù)據(jù)集,但I(xiàn)MU仍有存在的必要性。以下場(chǎng)景探討了其背后的一些原因:
1. AMR在特征稀疏的走廊中導(dǎo)航:同步定位與地圖繪制(SLAM)算法本質(zhì)上通過(guò)匹配觀察到的傳感器數(shù)據(jù)來(lái)工作,這些數(shù)據(jù)存儲(chǔ)在地圖中以便在地圖內(nèi)進(jìn)行定位。當(dāng)AMR穿越長(zhǎng)走廊時(shí)(見(jiàn)圖5),會(huì)很快迷失定位。由于缺乏獨(dú)特特征,例如,具有均勻顏色、紋理或反射率的直墻,SLAM難以精確定位。在這種情況下,IMU可通過(guò)提供航向和方向信息來(lái)充當(dāng)重要的引導(dǎo)系統(tǒng)。
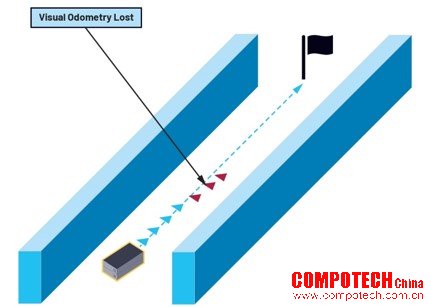
圖5.AMR在特征不明顯的走廊中失去視覺(jué)測(cè)程能力。
2. 在廣闊的開(kāi)放環(huán)境中導(dǎo)航:范圍限制:當(dāng)在大型開(kāi)放空間(如50 m×50 m的大型倉(cāng)庫(kù))中工作時(shí),AMR難以定位,因?yàn)楦鱾€(gè)獨(dú)特特征超出了傳感器范圍(LIDAR的最大范圍通常約為10 m到15 m)。如圖6所示,由于空間過(guò)大,AMR的測(cè)程功能無(wú)法發(fā)揮作用。此外,倉(cāng)庫(kù)通常具有統(tǒng)一的特征,因此也給視覺(jué)傳感器造成困難。在這種情況下,IMU和車輪編碼器是精確局部定位的唯一可靠來(lái)源。
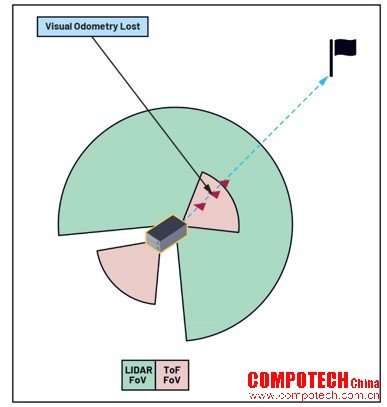
圖6.傳感器的視場(chǎng)(FoV)有限,AMR無(wú)法在寬闊的開(kāi)放空間內(nèi)進(jìn)行定位。
3. 在斜坡上行駛:當(dāng)在斜坡上行駛時(shí),傳統(tǒng)的SLAM算法依靠LIDAR時(shí)會(huì)遇到挑戰(zhàn),因?yàn)?D點(diǎn)數(shù)據(jù)不顯示坡度信息。因此,斜坡會(huì)被誤解為墻壁或障礙物,導(dǎo)致地圖成本更高。因此,采用2D系統(tǒng)的傳統(tǒng)SLAM方法在斜坡上變得無(wú)效。IMU可通過(guò)提取坡度信息(圖7)來(lái)幫助解決這一難題,從而有效地在斜坡上導(dǎo)航。
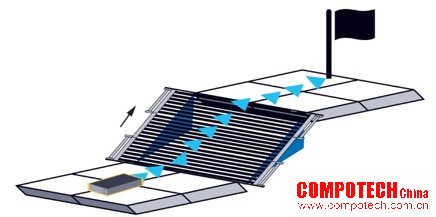
圖7.AMR在斜坡上行駛。
表1.各種用于定位的傳感器模塊的姿態(tài)和方向估計(jì)
|
傳感器模塊 |
受光線不足影響 |
受動(dòng)態(tài)移動(dòng)對(duì)象影響 |
受反射表面影響 |
依賴于豐富的場(chǎng)景幾何形狀 |
|
標(biāo)準(zhǔn)RGB攝像頭 |
是 |
是 |
否 |
否 |
|
飛行時(shí)間(ToF) |
否 |
是 |
是 |
是 |
|
LIDAR |
否 |
是 |
是 |
是 |
|
雷達(dá) |
否 |
是 |
是 |
是 |
|
車輪里程計(jì) |
否 |
否 |
否 |
否 |
|
IMU |
否 |
否 |
否 |
否 |
4. 導(dǎo)航時(shí)的環(huán)境因素:對(duì)環(huán)境因素的敏感性:LIDAR傳感器對(duì)各種環(huán)境因素很敏感,例如環(huán)境光、灰塵、霧和雨。這些因素會(huì)降低傳感器數(shù)據(jù)的質(zhì)量,進(jìn)而影響SLAM算法的性能。類似地,其他傳感器模塊也會(huì)受到反射表面和動(dòng)態(tài)移動(dòng)物體(其他AMR或工人)的影響,導(dǎo)致SLAM進(jìn)一步混淆。表1總結(jié)了環(huán)境對(duì)不同傳感器模塊的影響。IMU可以在各種環(huán)境中可靠運(yùn)行,因而成為移動(dòng)機(jī)器人在發(fā)揮多功能性時(shí)的合適選擇。
然而,沒(méi)有十全十美的傳感器!
盡管IMU有其優(yōu)勢(shì),但也存在風(fēng)險(xiǎn)并會(huì)帶來(lái)一些挑戰(zhàn)2:
1. 噪聲:IMU測(cè)量容易受到噪聲的影響,這會(huì)降低機(jī)器人導(dǎo)航和控制的準(zhǔn)確性。為了補(bǔ)償噪聲,IMU通常采用先進(jìn)的濾波技術(shù),例如卡爾曼濾波或FIR。
2. 偏置:IMU傳感器會(huì)隨著時(shí)間的推移積累偏置,這會(huì)導(dǎo)致方向和運(yùn)動(dòng)估計(jì)出現(xiàn)誤差。為了解決這個(gè)問(wèn)題,采用了偏置估計(jì)算法來(lái)不斷更新IMU傳感器讀數(shù)。
3. 非線性度:IMU傳感器表現(xiàn)出非線性行為,這會(huì)進(jìn)一步加劇數(shù)據(jù)處理和解釋的復(fù)雜性。為了對(duì)非線性度進(jìn)行補(bǔ)償,需要對(duì)其進(jìn)行校準(zhǔn)以表征傳感器的行為并應(yīng)用適當(dāng)?shù)男U?/span>
4. 隨機(jī)游走:IMU易受到外部熱機(jī)械事件的影響,導(dǎo)致ARW(角度隨機(jī)游走(陀螺儀中))和VRW(速度隨機(jī)游走(加速度計(jì)中))出現(xiàn)誤差。
如何降低這些風(fēng)險(xiǎn)?答案是傳感器融合!
? 傳感器融合有何幫助?
■ 提高可靠性。
■ 提高數(shù)據(jù)質(zhì)量。
■ 更好地估計(jì)未測(cè)量的狀態(tài)。
■ 增加覆蓋范圍從而確保安全。
? 傳感器融合算法意義:
■ 擴(kuò)展卡爾曼濾波等狀態(tài)估計(jì)技術(shù)可以糾正常規(guī)AMR運(yùn)行期間的噪聲、ARW和偏置不穩(wěn)定性誤差。
■ 通過(guò)測(cè)量地球引力加速度,可以消除IMU中的俯仰和滾轉(zhuǎn)陀螺儀誤差。
■ 該算法會(huì)跟蹤和糾正偏置漂移,并糾正ARW誤差。
? 擴(kuò)展卡爾曼濾波器(EKF):
■ 即使建模系統(tǒng)的確切性質(zhì)未知,也支持對(duì)過(guò)去、現(xiàn)在和未來(lái)狀態(tài)的估計(jì)。圖8顯示了簡(jiǎn)化的EKF算法。
■ 隨著時(shí)間的推移,觀察到的測(cè)量值包含高斯白噪聲或其他不準(zhǔn)確性,并通過(guò)以下方式估計(jì)測(cè)量的真實(shí)值
■ 同步傳感器之間的測(cè)量
■ 預(yù)測(cè)姿態(tài)和誤差估計(jì)
■ 估計(jì)和更新預(yù)測(cè)值的不確定性
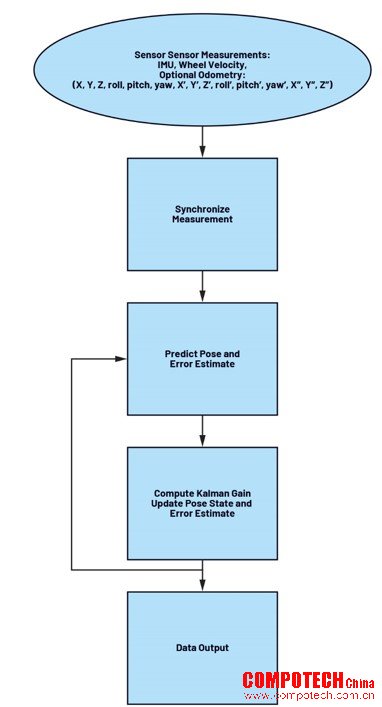
圖8.EKF算法(簡(jiǎn)化)。
? 傳感器融合:
■ 在典型的基于機(jī)器人操作系統(tǒng)(ROS)的系統(tǒng)中,視覺(jué)傳感器以及IMU和車輪里程計(jì)(圖9)使用流行的基于ROS的開(kāi)源軟件包robot_localization3進(jìn)行融合,該軟件包以EKF算法為核心。該軟件包可以融合不限數(shù)量的傳感器和各種傳感器輸入,如IMU、輪速和里程計(jì)。robot_localization給出的姿態(tài)輸出包括機(jī)器人位置和方向的3D估計(jì)以及線/角速度和加速度,這些信息都會(huì)輸入到SLAM算法中。姿態(tài)輸出表達(dá)如下:
姿態(tài)狀態(tài) = (X, Y, Z, 滾轉(zhuǎn), 俯仰, 偏航, X˙, Y˙, Z˙, 滾轉(zhuǎn)˙, 俯仰˙, 偏航˙, X¨, Y¨, Z¨)。
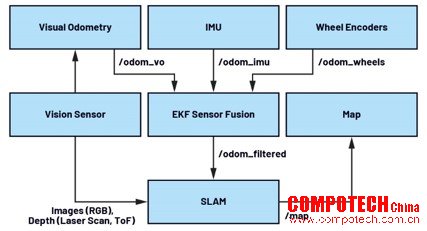
圖9.使用ROS的典型傳感器融合系統(tǒng)。
ADI IMU如何幫助解決這些挑戰(zhàn)?
ADI公司為包括移動(dòng)機(jī)器人在內(nèi)的各種應(yīng)用提供了多種IMU。提供的特有價(jià)值主張如下:
? 內(nèi)置校準(zhǔn):ADI IMU具有經(jīng)過(guò)充分出廠校準(zhǔn)的加速度計(jì)和陀螺儀尋址參數(shù),例如靈敏度、偏置、對(duì)準(zhǔn)、線性加速度的陀螺儀偏置和加速度計(jì)。內(nèi)置動(dòng)態(tài)偏移校正功能可補(bǔ)償電源電壓、溫度和磁場(chǎng)干擾的變化并具有降噪功能4。這可以顯著減少系統(tǒng)集成時(shí)間和采集成本,從而簡(jiǎn)化在不同條件下工業(yè)應(yīng)用中精確傳感器測(cè)量的整體實(shí)施。
? 低噪聲、高帶寬模數(shù)轉(zhuǎn)換器(ADC):以高精度和高帶寬捕獲傳感器數(shù)據(jù),確保可靠、靈敏的運(yùn)行。
? 高精度:ADI IMU提供精確的方向、運(yùn)動(dòng)和速度測(cè)量,使機(jī)器人能夠做出明智的決策并精確地在周圍環(huán)境中移動(dòng)。
? 低功耗:移動(dòng)機(jī)器人通常依靠電池供電,因此低功耗對(duì)于增加行駛里程至關(guān)重要。ADI IMU能效高,可最大程度降低功耗并最大程度延長(zhǎng)電池續(xù)航時(shí)間。
? 緊湊尺寸:為了安裝到移動(dòng)機(jī)器人有限的空間中,ADI IMU采用了緊湊的外形設(shè)計(jì),因此可以輕松集成到各種機(jī)器人配置中,而不會(huì)影響性能。
? 易于集成:與機(jī)器人控制系統(tǒng)的輕松集成對(duì)于無(wú)縫操作至關(guān)重要。ADI的IMU測(cè)試板與開(kāi)源ROS節(jié)點(diǎn)相結(jié)合,可以輕松集成以構(gòu)建AMR。
結(jié)論
IMU是AMR定位的必備元件,因?yàn)镮MU可以提供方向估計(jì)和運(yùn)動(dòng)跟蹤,并以高刷新速率提供實(shí)時(shí)響應(yīng),使得AMR能夠在動(dòng)態(tài)環(huán)境中行駛。借助卡爾曼濾波器等傳感器融合技術(shù),可以組合其他傳感器模塊來(lái)彌補(bǔ)彼此的局限性。ADI提供豐富多樣的IMU來(lái)滿足各種移動(dòng)機(jī)器人應(yīng)用的特定要求。
參考文獻(xiàn)
1 Shoudong Huang和Gamini Dissanayake。“機(jī)器人定位:簡(jiǎn)介”。John Wiley & Sons, Inc.,2016年8月。
2 Oliver J. Woodman。“慣性導(dǎo)航簡(jiǎn)介”。劍橋大學(xué),2007年8月。
3 robot_localization 2.6.12文檔。Tom Moore,2016年。
4 Randy Carver和Mark Looney。“MEMS加速度計(jì)校準(zhǔn)可優(yōu)化工業(yè)應(yīng)用的精度”。EE Times,2007年10月。
關(guān)于ADI
Analog Devices, Inc. (NASDAQ: ADI)是全球領(lǐng)先的半導(dǎo)體公司,致力于在現(xiàn)實(shí)世界與數(shù)字世界之間架起橋梁,以實(shí)現(xiàn)智能邊緣領(lǐng)域的突破性創(chuàng)新。ADI提供結(jié)合模擬、數(shù)字和軟件技術(shù)的解決方案,推動(dòng)數(shù)字化工廠、汽車和數(shù)字醫(yī)療等領(lǐng)域的持續(xù)發(fā)展,應(yīng)對(duì)氣候變化挑戰(zhàn),并建立人與世界萬(wàn)物的可靠互聯(lián)。ADI公司2023財(cái)年收入超過(guò)120億美元,全球員工約2.6萬(wàn)人。攜手全球12.5萬(wàn)家客戶,ADI助力創(chuàng)新者不斷超越一切可能。更多信息,請(qǐng)?jiān)L問(wèn)
作者簡(jiǎn)介
Sarvesh Pimpalkar是一名系統(tǒng)應(yīng)用工程師,在ADI公司的工業(yè)邊緣、運(yùn)動(dòng)和機(jī)器人團(tuán)隊(duì)工作,專注于研發(fā)移動(dòng)機(jī)器人。他的專業(yè)領(lǐng)域是Linux和嵌入式系統(tǒng)的軟件系統(tǒng)設(shè)計(jì)和產(chǎn)品開(kāi)發(fā)。他擁有都柏林城市大學(xué)電子與計(jì)算機(jī)工程碩士學(xué)位、印度管理學(xué)院班加羅爾分校青年領(lǐng)袖高管綜合管理課程認(rèn)證以及孟買大學(xué)電子工程學(xué)士學(xué)位。在加入ADI公司之前,Sarvesh曾擔(dān)任設(shè)計(jì)工程師,負(fù)責(zé)開(kāi)發(fā)各種工業(yè)產(chǎn)品的硬件、固件和自動(dòng)化。
本月熱點(diǎn) HOME
- 浮地非隔離半橋柵極驅(qū)動(dòng)器
- 使用高度集成的處理器設(shè)計(jì)高
- 解鎖掃地機(jī)器人里的智慧“芯
- 電源設(shè)計(jì)小貼士 | 用于電動(dòng)汽
- 提升高瞬態(tài)汽車應(yīng)用的速度和
- 為什么碳化硅Cascode JFET 可以輕
- 在車輛入侵監(jiān)控系統(tǒng)中使用雷
- 物聯(lián)網(wǎng)邊緣傳感器節(jié)點(diǎn):超越
- 先進(jìn)的電流和電壓檢測(cè)技術(shù)如
- 開(kāi)關(guān)模式電源開(kāi)始采用GaN開(kāi)關(guān)
- 深入了解電池管理系統(tǒng)的開(kāi)路
- 如何優(yōu)化超低噪聲μModule穩(wěn)壓器
欄目熱點(diǎn) HOME
- 業(yè)界資訊
 是德科技 FieldFox 手持式分析儀配合 VDI 擴(kuò)頻模塊,實(shí)現(xiàn)毫米波分析功能
是德科技 FieldFox 手持式分析儀配合 VDI 擴(kuò)頻模塊,實(shí)現(xiàn)毫米波分析功能 -
業(yè)界資訊
推進(jìn)ECU板對(duì)板連接,提升自動(dòng)駕駛水平
02-06 -
新品報(bào)到

阜博集團(tuán)發(fā)布DreamMaker新產(chǎn)品
03-28 -
業(yè)界資訊

香港生產(chǎn)力促進(jìn)局2021年「成就智上」年度主題
02-28 -
業(yè)界資訊

西門子收購(gòu) Dotmatics,將 AI 驅(qū)動(dòng)的工業(yè)軟件版圖擴(kuò)展至生命科學(xué)領(lǐng)域
04-06 -
業(yè)界資訊
西門子收購(gòu) Dotmatics,將 AI 驅(qū)動(dòng)的工業(yè)軟件版圖擴(kuò)展至生命科學(xué)領(lǐng)域
04-06