當前位置: CompoTech China > 關鍵技術和應用 >
在工業環境中,每天需要處理不同形狀、尺寸、材料和光學特性(如反射比、吸收等)的零件。這些零件必須以特定的方向挑選和放置,然后進行加工。將這些零件隨機從存放的環境(容器或其他)中自動挑選并放置的活動通常被稱為箱揀。但這對機器人末端執行器(一種連接到機械臂末端的設備)提出了挑戰,它需要準確地知道要抓取物體的3D位置、尺寸及其想方向。為了做到在箱子外壁和箱內其他物體周圍準確導航,機器人的機器視覺系統除了需要獲取2D相機信息外,還需要獲取深度信息。
對于箱揀來說,捕獲物體3D影像的難題可以由結構光技術解決。基于結構光技術的3D掃描儀/相機通過將一系列圖案投射到被掃描的物體上而工作,并且用相機或傳感器來捕獲圖案失真。然后三角剖分算法計算數據并輸出3D點云。圖像處理軟件(如MVTech開發的Halcon)計算物體位置和機械臂的最佳進場路線(圖1)。
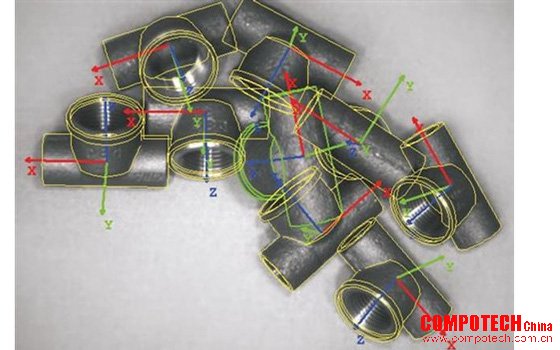
圖1:使用Halcon將管接頭與其各自的3D模型進行匹配的示例(來源:MVTech開發的Halcon)
DLP技術通過安裝在半導體芯片頂部的微鏡矩陣(也稱為數字微鏡器件,DMD)提供高速圖案投射能力,如圖2所示。DMD上的每個像素表示投影圖像中的一個像素,并允許像素精確圖像投影。微鏡在~ 3us時可以轉換,以通過投影透鏡將入射光反射到物體上或光塊上。前者可以在投影場景中獲得明亮像素,而后者可以創建暗像素。DLP技術也具備獨特的優勢,能夠使用各種光源(如燈、LED和激光)在寬波長范圍(420 nm – 2500 nm)內投射圖案。
用于箱揀的由DLP技術驅動的結構光具備多種優勢:
? 抗環境光照能力強。工廠的光照條件,如低曝光和不同照明區域之間的高對比度,導致傳感器曝光不足或會對機器視覺系統產生干擾的閃光燈,對需要機器視覺的應用(如箱揀)來說是一大挑戰。由DLP技術驅動的結構光本身具有主動照明,這使得它能夠抵抗這些條件。
? 無活動部件。結構光系統可以立即捕獲整個場景,不再需要將光束掃過物體或通過光束移動物體(如在掃描解決方案中)。結構光系統保護在宏觀尺度內不使用活動部件,這使其能夠免受機械磨損。
? 實時3D圖像采集。DLP芯片中的微鏡以高速度控制,可提供高達32kHz的自定義圖案投影。除此之外,DLP控制器提供觸發輸出和輸入,可用于使相機和其他設備與投影圖案序列保持同步。這些功能有助于實現允許同時掃描和挑選的實時3D圖像采集。
? 投影圖案的高對比度和高分辨率。由于每塊微鏡可以將光反射到目標或吸收表面上,因而可以獲得高對比度,使得能夠在不受物體表面屬性影響情況下進行準確的點檢測。再加上使用具有2560 x 1600塊鏡子的高分辨率DLP芯片,可以探測到微米級的物體。
? 適用于物體參數。與使用衍射光學元件的系統相比,可編程圖案和各種點編碼方案(如相移或格雷編碼)使結構光系統更適合對象參數。
? 加快開發時間。盡管機器人提供較高的重復性,但在非結構化環境中,箱揀需要精確性。因為在這種環境下,每次從儲存箱中取出一個物體時,所揀選的物體的位置和方向都會發生變化。成功應對這一挑戰需要可靠的工藝流程——從機器視覺到計算軟件,再到機器人的靈巧性和抓取器。使所有東西協同工作可能是一項耗費大量開發時間的挑戰。
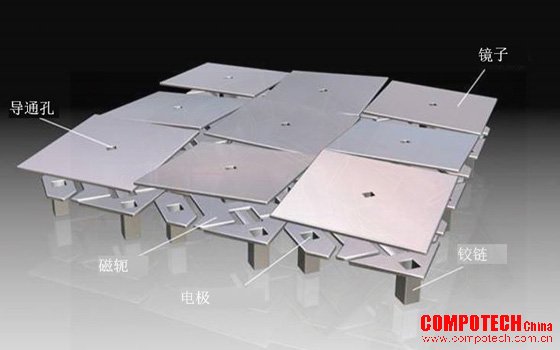
圖2:DLP芯片包含數百萬個可在高速下單獨控制并反射光線以產生投影圖案的微鏡。
TI的DLP技術評估模塊能夠將結構光快速植入機器視覺工作流程。為了演示這種能力,工廠自動化與控制系統工程師以一定的距離和角度將DLP LightCrafter 4500評估板安裝至單色相機。DLP評估板由相機通過一根互相連接的觸發電纜觸發;如圖3所示。
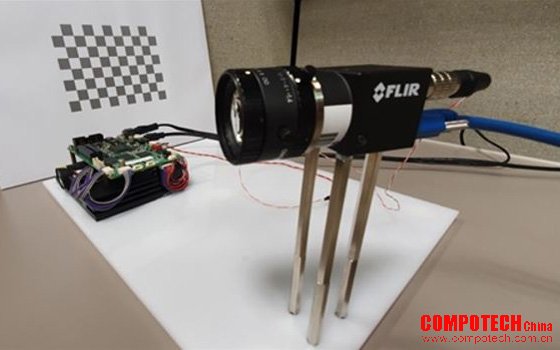
圖3:結構光設置,包括DLP產品LightCrafter 4500(左)、灰點前視紅外線Flea3相機(右)和校準(后)。
電路板和相機都通過USB連接到PC,且整個設置都用于校準板。使用DLP®技術為3D機器視覺應用程序精確生成點云的參考設計中軟件之后會被用于校準相機和投影儀的參數,如焦距、焦點、鏡頭失真、相對于校準板的相機平移和旋轉。參考設計用戶指南逐步介紹了此過程。
只有當相機相對于DLP產品板移動時,才需要重新校準。
在完成設置之后,可以創建真實目標的點云。這些云由軟件以任意文件格式輸出,然后由Halcon的HDevelop平臺上開發的一些簡短代碼來讀取和顯示。圖4顯示了一個點云,該點云對裝滿咖啡杯的箱子的深度信息進行了顏色編碼。
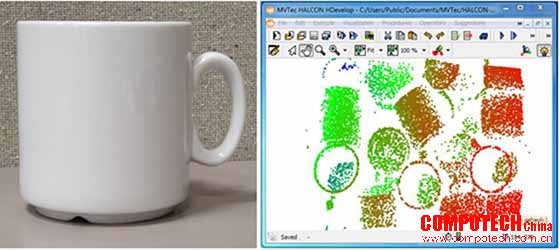
圖4:在Halcon HDevelop(右)中顯示的箱子中,捕捉到的杯子(左)和由DLP驅動的多個杯子的結構光獲取的點云
Halcon的表面匹配可以通過比較點云和杯子的3D CAD模型來確定杯子的3D姿態。這樣一來,機械臂現在就可以“看到”物體,并且可以計算出機械臂的最佳進場路線,使其能夠避開非結構化和不斷變化的環境中的障礙物,從而從箱中挑選出物體。
其他資源
? 了解更多有關“用于3D機器視覺的高度可擴展TI DLP技術。”
? 閱讀白皮書“使用德州儀器DLP結構光技術進行高精度3D掃描。”
? 了解更多關于TI DLP技術的信息。
? 閱讀白皮書“使用德州儀器DLP結構光技術進行高精度3D掃描。”
? 了解更多關于TI DLP技術的信息。
本月熱點 HOME